V.01
Constrained motion recovery
Recovery of camera pose and motion in scenes where geometry is partially known — planar surfaces, surveyed reference points, or scan-derived constraints.
Active focus
A running statement of the boundary of what Tattva3D currently claims. Items shift from in-progress to validated only when the underlying measurement is reproducible by an outside reviewer.
Recovery of camera pose and motion in scenes where geometry is partially known — planar surfaces, surveyed reference points, or scan-derived constraints.
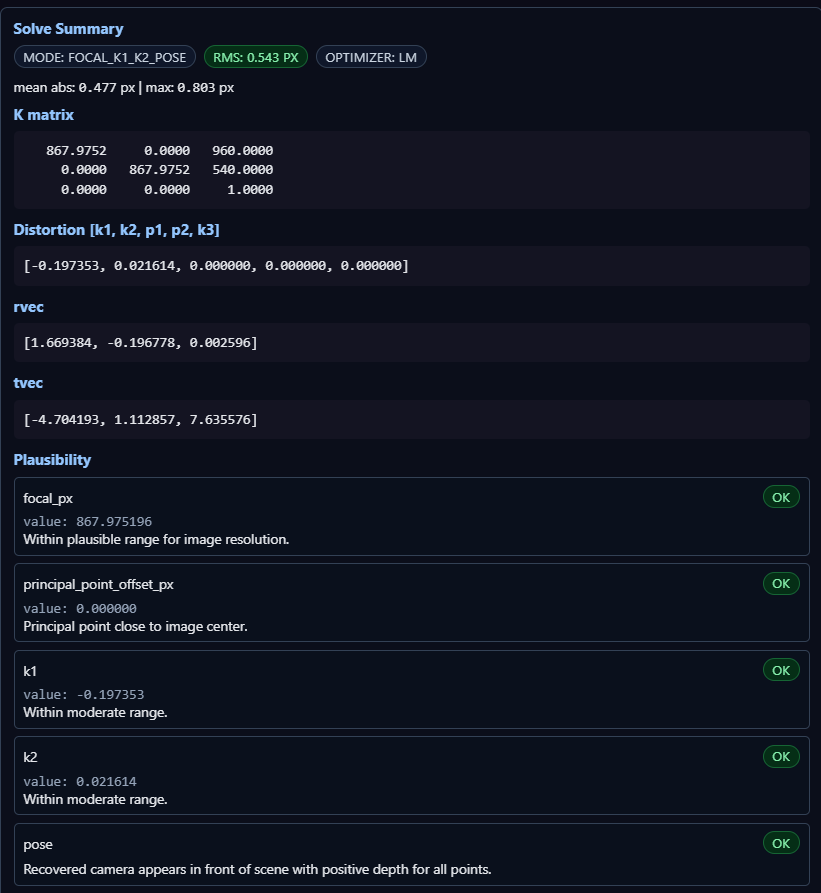
Intrinsics and radial / tangential distortion solved from measured correspondences and checked by reprojection residuals on held-out points.
Feature extraction and inter-frame tracking filtered for epipolar and rigidity consistency before any track participates in pose estimation.
Per-frame pose from 2D ↔ 3D correspondences. Each frame is solved independently and logged before any temporal smoothing is applied.
Solver configuration, initialization, and convergence criteria are fixed and logged so runs can be reproduced within a pinned toolchain.
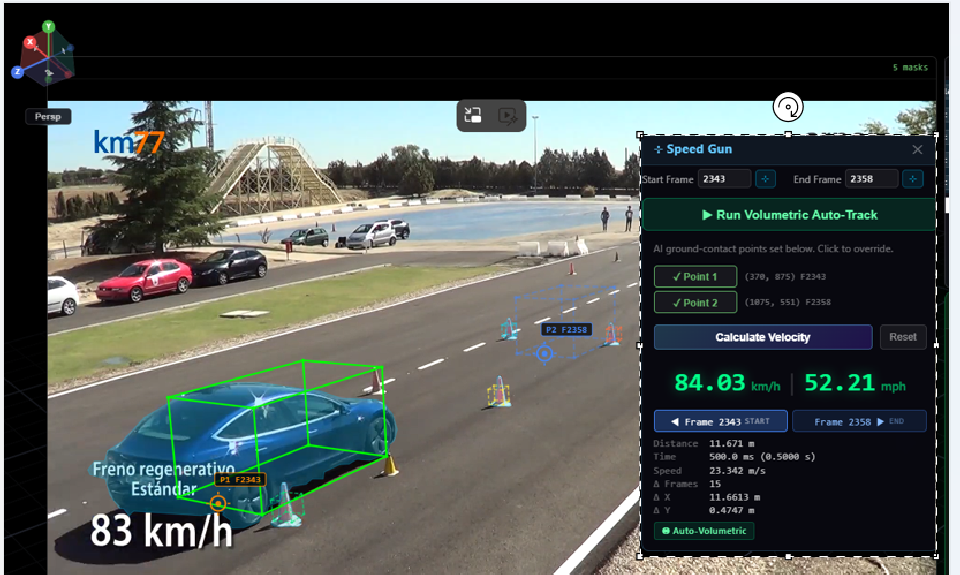
Speed derived from per-frame poses against scene-aligned units. Currently being characterized across motion regimes and scene geometries.
Inputs, parameters, intermediates, and outputs are persisted so a run can be reproduced from its manifest by an external reviewer.
Output of a single reference-frame solve. Reprojection residuals, intrinsics, distortion coefficients, and recovered pose are all inspectable, with per-parameter plausibility checks logged alongside the result.
An early constrained validation case. Speed is derived from per-frame poses against scene-aligned units. The 83 km/h value visible in the source footage is treated as a reference shown in the source video, not as externally verified ground truth.
Validation is treated as an obligation, not a marketing claim. If a capability is not listed above as implemented or validated, it is not something Tattva3D will assert in a forensic context. The list expands only when the underlying measurement is reproducible end-to-end by a third party from the audit manifest alone.