An inspectable chain from evidence to measurement.
Tattva3D is built around a single principle: every number that leaves the system can be traced back through a deterministic computation to measured inputs — a calibrated lens, tracked image points, and scene geometry that can be surveyed.
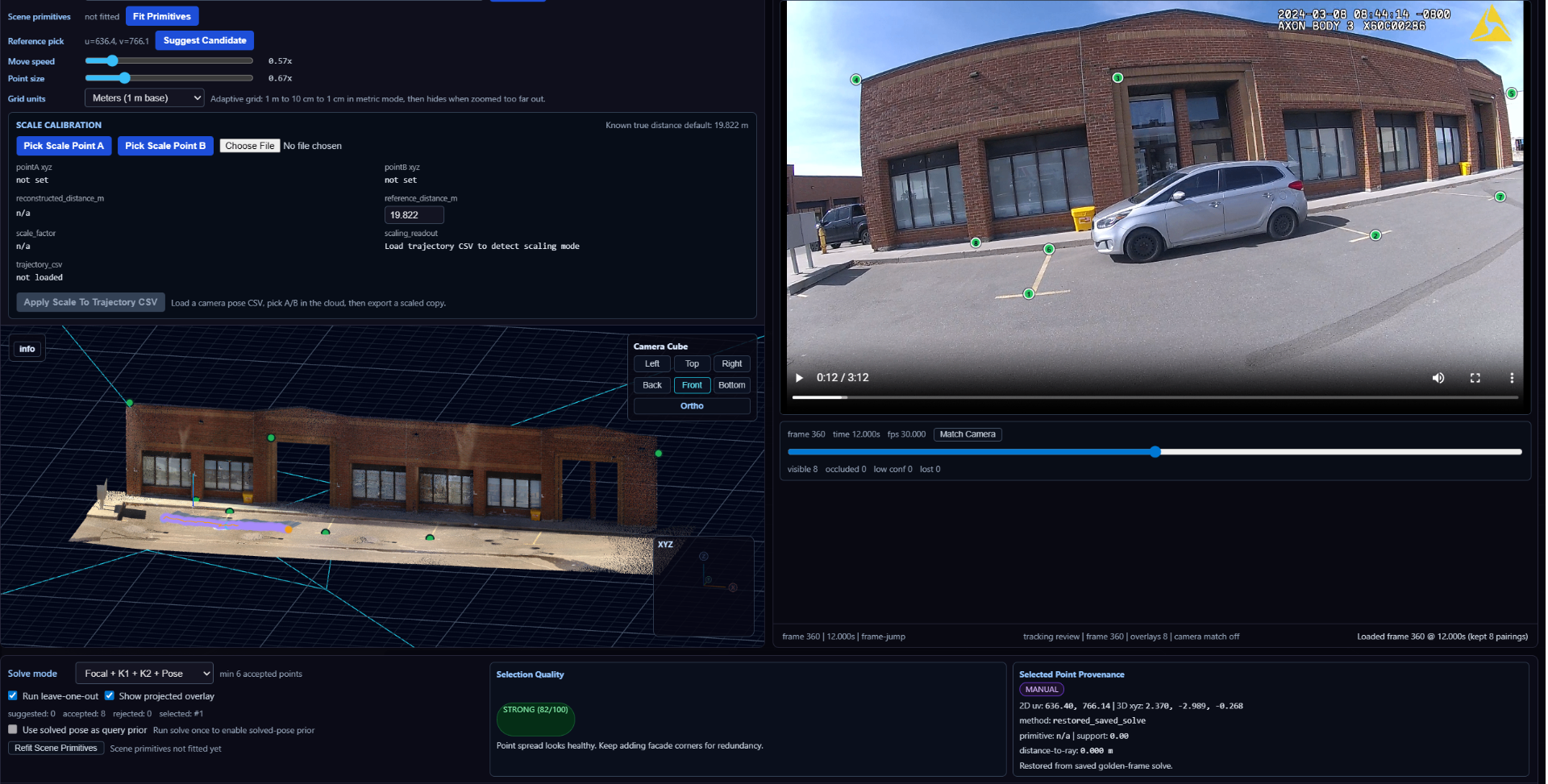
A single-frame example: selected image points on the source frame paired with the corresponding constrained scene geometry. Each correspondence is measurable and the resulting solve is rerunnable from the logged manifest.
Six stages, each independently inspectable.
Lens validation
Intrinsics and distortion are estimated and validated against measured 2D ↔ 3D correspondences. The lens model is treated as a hypothesis to be tested, not an assumption to be inherited from EXIF.
Tracked points
Stable image features are tracked across frames. Tracks are filtered for geometric consistency before they participate in any pose computation.
Reverse PnP — camera pose
For each frame, camera pose is solved from tracked image points and known scene geometry using a calibrated Perspective-n-Point formulation. Each frame’s solution is independently auditable.
Deterministic optimization
Solver configuration, initialization, and convergence criteria are fixed and logged to support reproducible reruns within a pinned toolchain. The intent is that an outside reviewer can re-execute a run from its manifest and obtain the same result.
Constrained speed estimation
Velocity is derived from per-frame poses against scene-aligned units. Estimates carry explicit uncertainty bounds, never a single unqualified number.
Browser-based review
Inputs, parameters, intermediates, and outputs are inspectable in a browser. The same review surface is used internally and by external parties — there is no privileged view.
Determinism. Within a pinned toolchain, the same inputs and parameters are intended to yield the same outputs. No stochastic "best guess" sits at the end of the pipeline.
Constrained inputs only. Tattva3D operates where scene geometry is known or can be measured. It does not invent unseen structure to fill gaps.
Explicit uncertainty. Every reported quantity carries the propagated uncertainty of the inputs that produced it.
Reviewability. Every intermediate is logged. Every run is reproducible. Reviewers see the same data the operator saw.